
Model difusi seperti Openai’s Dall-E menjadi semakin berguna dalam membantu bertukar pikiran desain baru. Manusia dapat mendorong sistem ini untuk menghasilkan gambar, membuat video, atau memperbaiki cetak biru, dan kembali dengan ide -ide yang belum pernah mereka pertimbangkan sebelumnya.
Tetapi tahukah Anda bahwa model Kecerdasan Buatan Generatif (Genai) juga membuat kemajuan dalam menciptakan robot yang berfungsi? Pendekatan berbasis difusi terbaru telah menghasilkan struktur dan sistem yang mengendalikannya dari awal. Dengan atau tanpa input pengguna, model ini dapat membuat desain baru dan kemudian mengevaluasinya dalam simulasi sebelum dibuat.
Pendekatan baru dari Ilmu Komputer MIT dan Laboratorium Kecerdasan Buatan (CSAIL) menerapkan pengetahuan generatif ini untuk meningkatkan desain robot manusia. Pengguna dapat menyusun model 3D robot dan menentukan bagian mana yang ingin mereka lihat model difusi memodifikasi, memberikan dimensinya sebelumnya. Genai kemudian melakukan brainstorming bentuk optimal untuk area ini dan menguji idenya dalam simulasi. Saat sistem menemukan desain yang tepat, Anda dapat menyimpan dan kemudian membuat robot dunia nyata yang berfungsi dengan printer 3D, tanpa memerlukan penyesuaian tambahan.
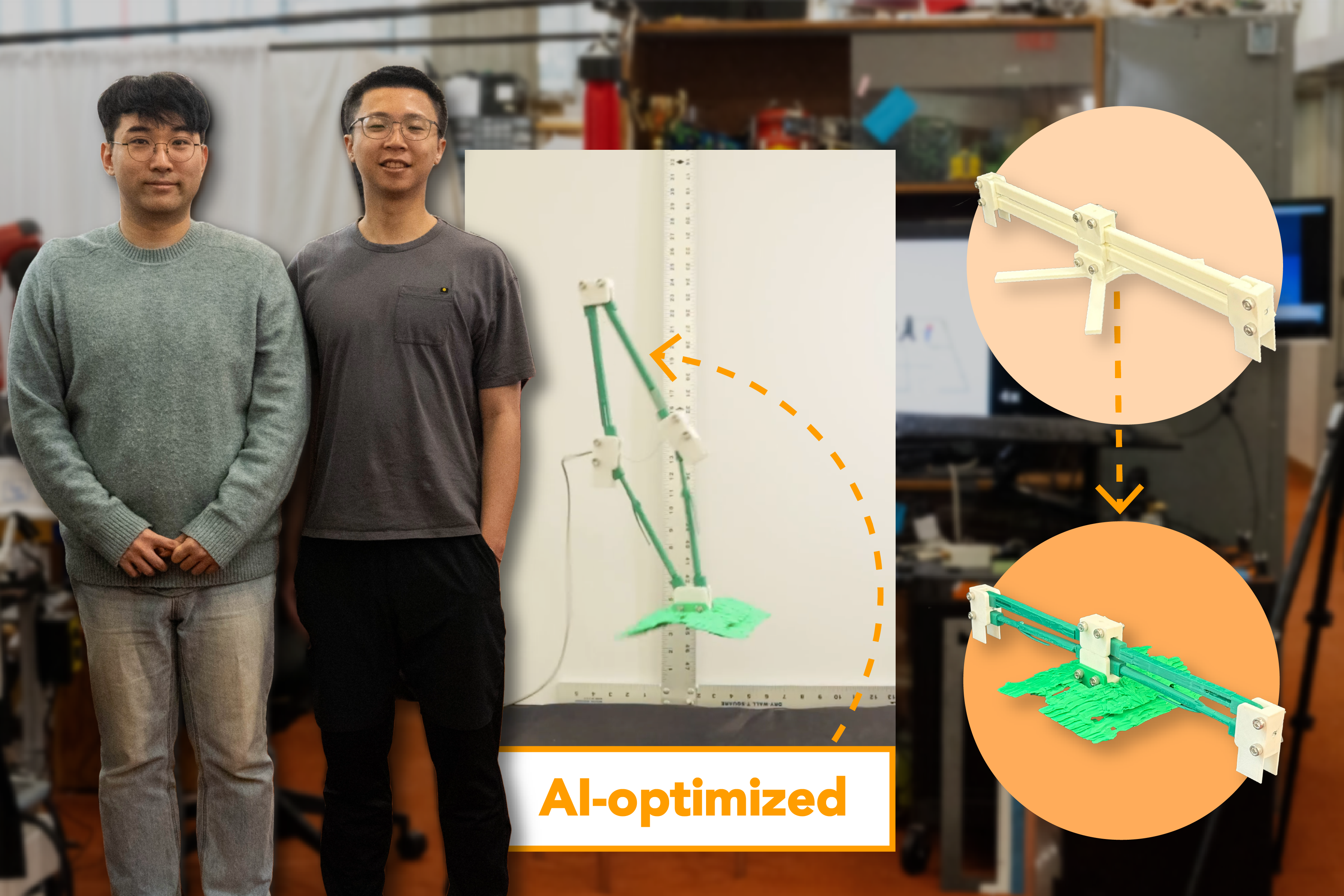
Para peneliti menggunakan pendekatan ini untuk membuat robot yang melompat rata -rata sekitar 2 kaki, atau 41 persen lebih tinggi dari mesin serupa yang mereka buat sendiri. Mesin -mesinnya hampir identik dalam penampilan: keduanya terbuat dari jenis plastik yang disebut asam polylactic, dan sementara mereka awalnya tampak rata, mereka bermunculan ke dalam bentuk berlian ketika motor menarik kabel yang melekat padanya. Jadi apa sebenarnya yang AI lakukan secara berbeda?
Pandangan yang lebih dekat mengungkapkan bahwa hubungan yang dihasilkan AI melengkung, dan menyerupai stik tebal (penggunaan drumer alat musik), sedangkan bagian penghubung robot standar lurus dan persegi panjang.
Gumpalan yang lebih baik dan lebih baik
Para peneliti mulai memperbaiki robot melompat mereka dengan mencicipi 500 desain potensial menggunakan vektor embedding awal-representasi numerik yang menangkap fitur tingkat tinggi untuk memandu desain yang dihasilkan oleh model AI. Dari ini, mereka memilih 12 opsi teratas berdasarkan kinerja dalam simulasi dan menggunakannya untuk mengoptimalkan vektor embedding.
Proses ini diulangi lima kali, secara progresif memandu model AI untuk menghasilkan desain yang lebih baik. Desain yang dihasilkan menyerupai gumpalan, sehingga para peneliti mendorong sistem mereka untuk skala draft agar sesuai dengan model 3D mereka. Mereka kemudian mengarang bentuknya, menemukan bahwa itu memang meningkatkan kemampuan melompat robot.
Keuntungan menggunakan model difusi untuk tugas ini, menurut penulis co-lead dan CSAIL PostDoc Byungchul Kim, adalah bahwa mereka dapat menemukan solusi yang tidak konvensional untuk memperbaiki robot.
“Kami ingin membuat mesin kami melompat lebih tinggi, jadi kami pikir kami bisa membuat tautan yang menghubungkan bagian -bagiannya setipis mungkin untuk membuatnya ringan,” kata Kim. “Namun, struktur yang tipis seperti itu dapat dengan mudah pecah jika kita hanya menggunakan bahan cetak 3D. Model difusi kami muncul dengan ide yang lebih baik dengan menyarankan bentuk unik yang memungkinkan robot untuk menyimpan lebih banyak energi sebelum melompat, tanpa membuat tautan terlalu tipis. Kreativitas ini membantu kami mempelajari tentang fisika yang mendasari mesin.”
Tim kemudian menugaskan sistem mereka dengan menyusun kaki yang dioptimalkan untuk memastikannya mendarat dengan aman. Mereka mengulangi proses optimasi, akhirnya memilih desain berkinerja terbaik untuk melekat pada bagian bawah mesin mereka. Kim dan rekan-rekannya menemukan bahwa mesin yang dirancang AI mereka jatuh jauh lebih jarang daripada baseline-nya, dengan nada peningkatan 84 persen.
Kemampuan model difusi untuk meningkatkan keterampilan lompatan dan pendaratan robot menunjukkan itu bisa berguna dalam meningkatkan bagaimana mesin lain dirancang. Misalnya, perusahaan yang bekerja pada manufaktur atau robot rumah tangga dapat menggunakan pendekatan serupa untuk meningkatkan prototipe mereka, menghemat waktu insinyur yang biasanya dicadangkan untuk mengulangi perubahan tersebut.
Keseimbangan di balik bouncing
Untuk membuat robot yang bisa melompat tinggi dan mendarat secara stabil, para peneliti mengakui bahwa mereka perlu mencapai keseimbangan antara kedua tujuan. Mereka mewakili ketinggian melompat dan tingkat keberhasilan pendaratan sebagai data numerik, dan kemudian melatih sistem mereka untuk menemukan sweet spot antara kedua vektor yang menanamkan yang dapat membantu membangun struktur 3D yang optimal.
Para peneliti mencatat bahwa sementara robot yang dibantu AI ini mengungguli rekannya yang dirancang manusia, ia dapat segera mencapai ketinggian baru yang lebih besar. Iterasi ini melibatkan penggunaan bahan yang kompatibel dengan printer 3D, tetapi versi masa depan akan melompat lebih tinggi dengan bahan yang lebih ringan.
Penulis co-lead dan mahasiswa PhD MIT dan afiliasi CSAIL Tsun-Hsuan “Johnson” Wang mengatakan proyek ini adalah titik awal untuk desain robotika baru yang dapat membantu AI generatif.
“Kami ingin bercabang ke tujuan yang lebih fleksibel,” kata Wang. “Bayangkan menggunakan bahasa alami untuk memandu model difusi untuk menyusun robot yang dapat mengambil cangkir, atau mengoperasikan bor listrik.”
Kim mengatakan bahwa model difusi juga dapat membantu menghasilkan artikulasi dan mengutip tentang bagaimana bagian terhubung, berpotensi meningkatkan seberapa tinggi robot akan melompat. Tim ini juga mengeksplorasi kemungkinan menambahkan lebih banyak motor untuk mengontrol arah mana mesin melompat dan mungkin meningkatkan stabilitas pendaratannya.
Pekerjaan para peneliti didukung, sebagian, oleh perbatasan yang muncul di National Science Foundation dalam Program Penelitian dan Inovasi, Aliansi Singapura-MIT untuk Program Penelitian dan Teknologi, Manus dan Machina, dan Kolaborasi Gwangju Institute of Science and Technology (GIST) -CSAIL. Mereka mempresentasikan karya mereka di Konferensi Internasional 2025 tentang Robotika dan Otomasi.


